Note




Bayes Filter
We can use such a graph to understand the meaning of Bayes Filter. For a certain moment \(t\), we apply a control \(u_t\) to the system, drive the system's state from \(x_{t-1}\) to \(x_t\). And at this particular moment, we can only obtain the measurement \(z_t\) rather than directly get \(x_t\). So attemp to estimate the state of the system for given input and measurement is the purpose of Bayes Filter.
graph LR
L("x(0)") --> J(...)
J--> B
A("u(t-1)") --> B("x(t-1)")
B --> C("z(t-1)")
B --> E
D("u(t)") --> E("x(t)")
E --> F("z(t)")
E --> H
G("u(t+1)") --> H("x(t+1)")
H --> I("z(t+1)")
H --> K(...)
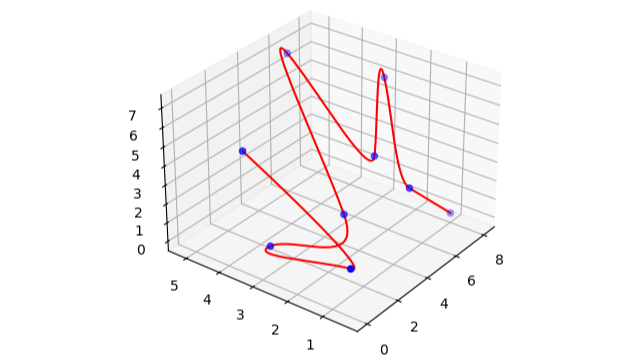
Cubic Spline 三次样条曲线
System Model
For a group of certain points \((x_{0,1},x_{0,2},\cdots,x_{0,m}),(x_{1,1},x_{1,2},\cdots,x_{1,m}), (x_{2,1},x_{2,2},\cdots,x_{2,m}), \cdots, (x_{n,1},x_{n,2},\cdots,x_{n,m})\), we want to find a smooth enough curve that passes all these points to achieve the interpolation goal. To do so, we can use piecewise cubic functions to fitting the points.