Projects
For FRC 2025 game rules, the mission of the robot is to place the coral, convey the algae, and hang on the cage.
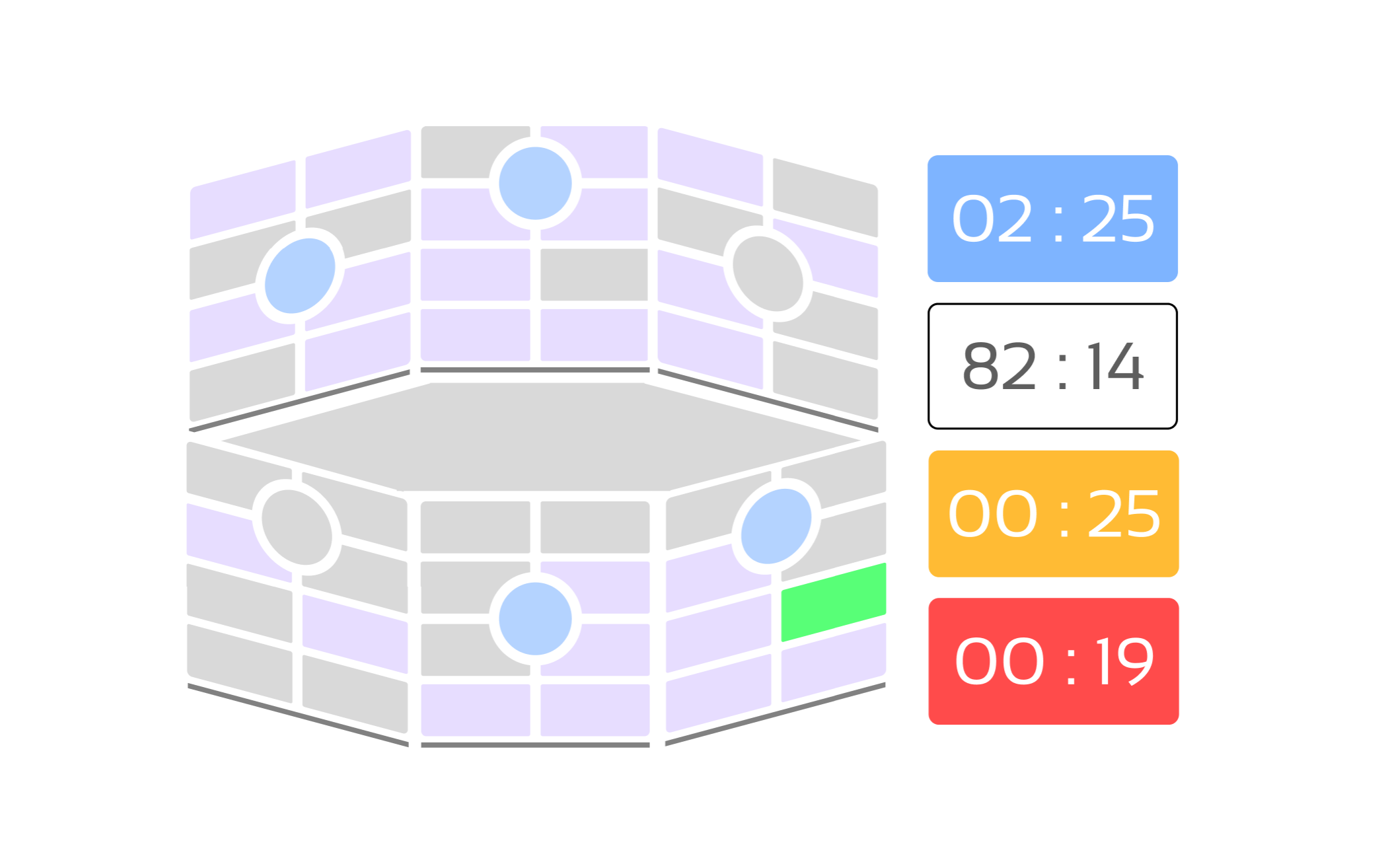
🔮 Mechanism-level Action Visualization
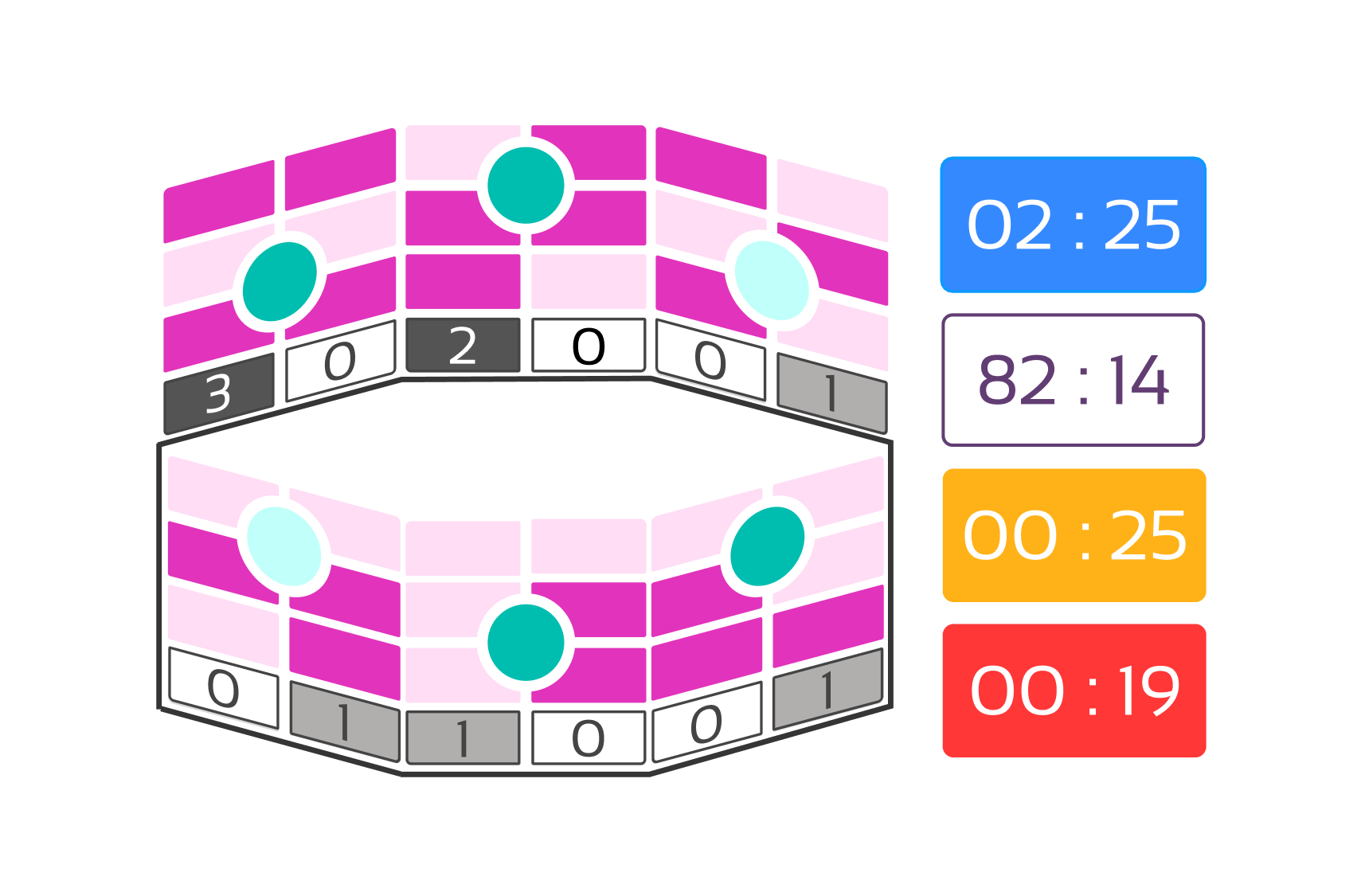
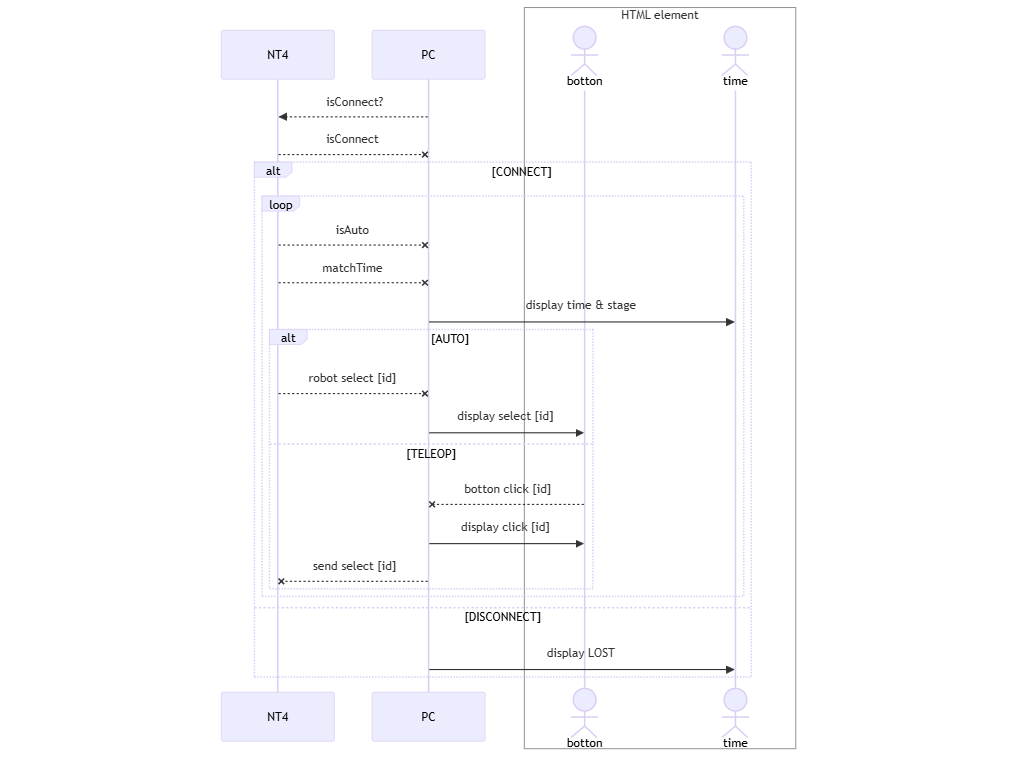
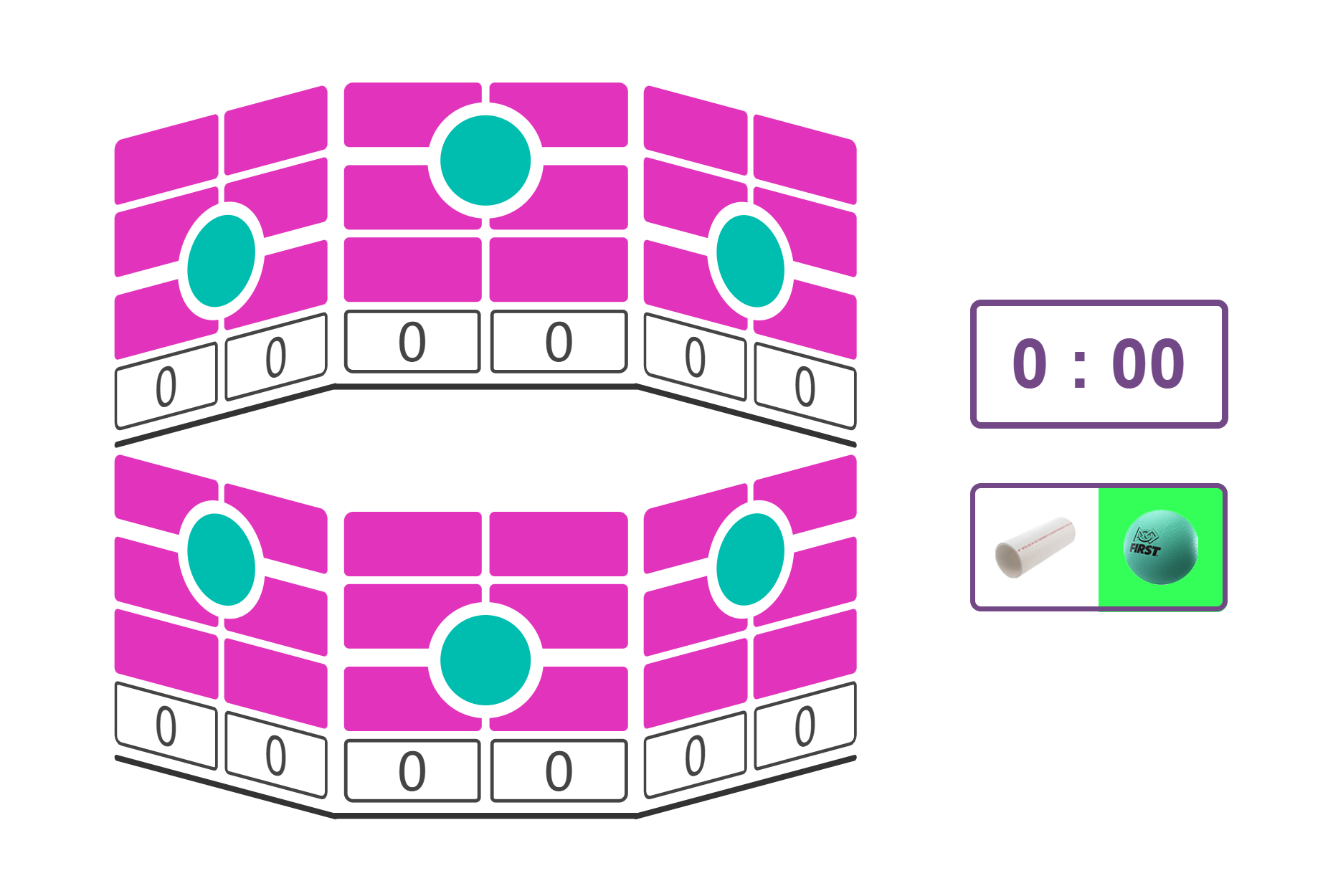
🕹️ Custom Node Selection Panel Cyber Selector





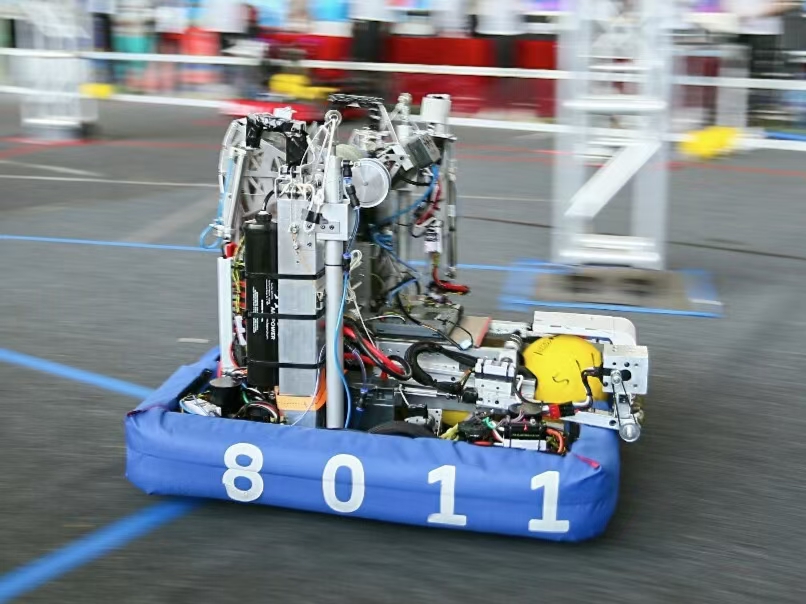
For FRC 2024 game rules, the mission of the robot is to collect the note and shoot to the speaker or to the amp.
⚙️ AprilTag based VO and IMU Coupled Localization
🏆 Engineering Inspiration Award in 2024 FRC Off-season China


Zirui Zhang, Yue Peng
Supervisor: Prof. Chuan Shi, BUPT
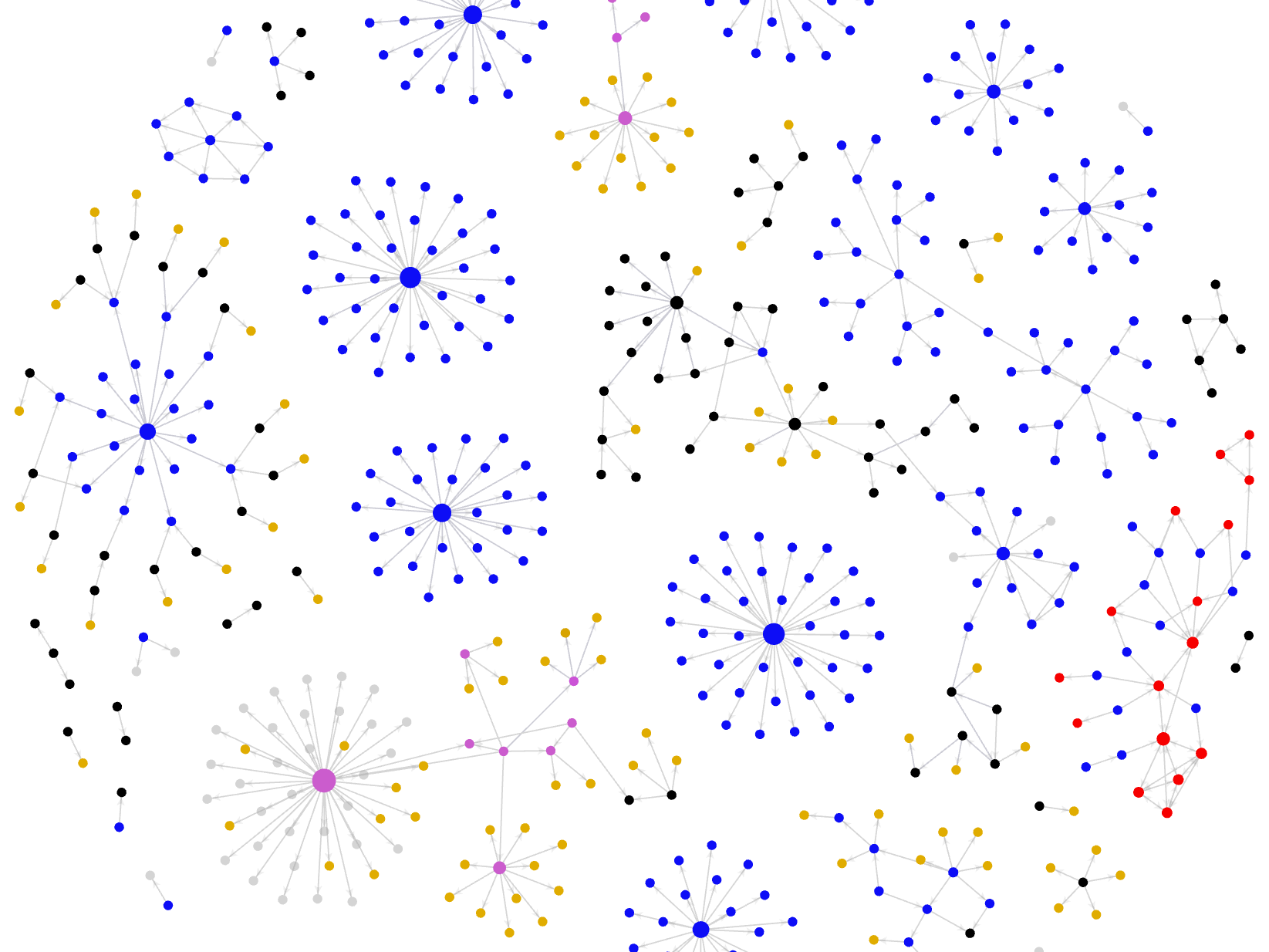
The project aims to improve the accuracy and personalization of public library services.
🏆 Excellent Award in 2023 Rhino-Bird Program




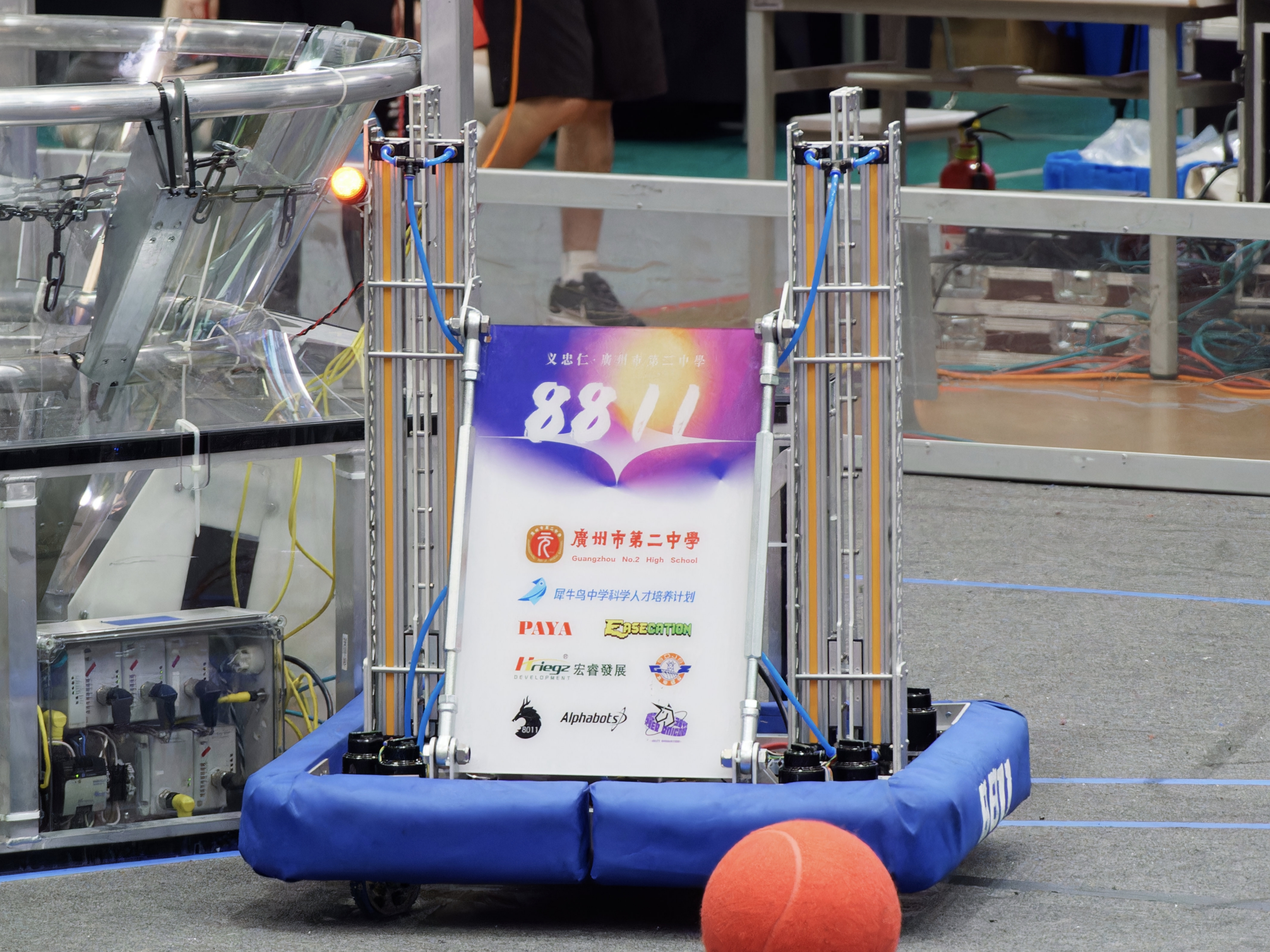
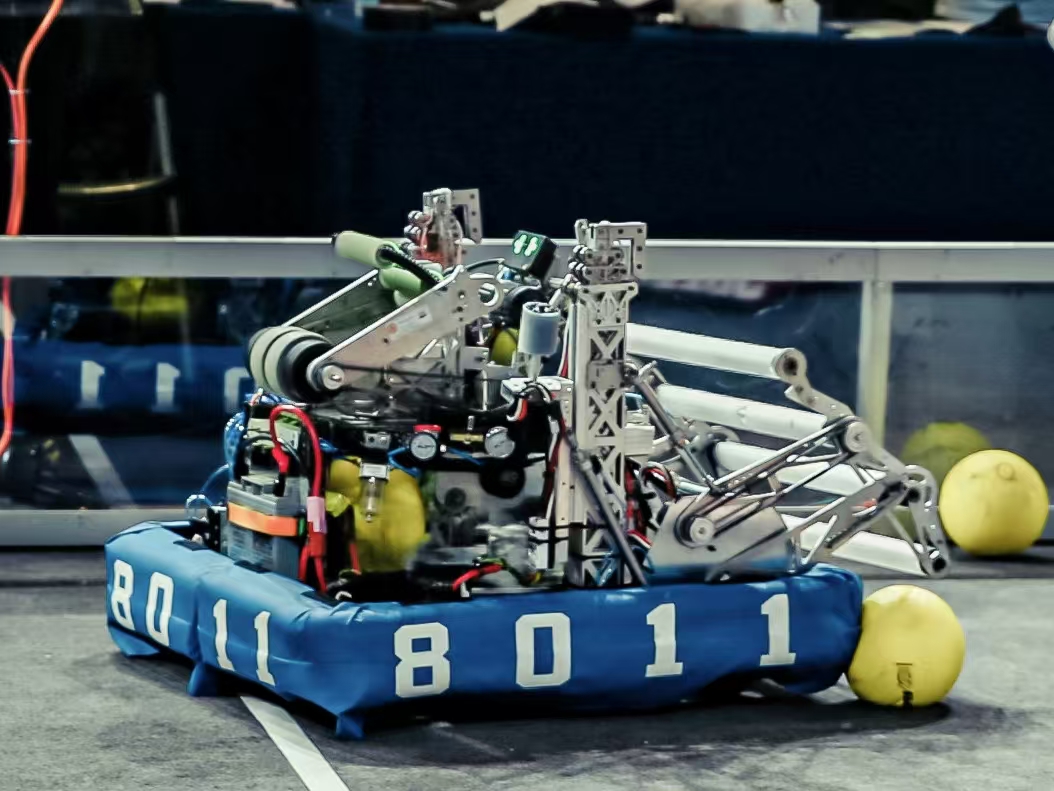
For 2023 FRC Off-season China game rules, the mission of the robot is to collect and shoot the balls to the hub.
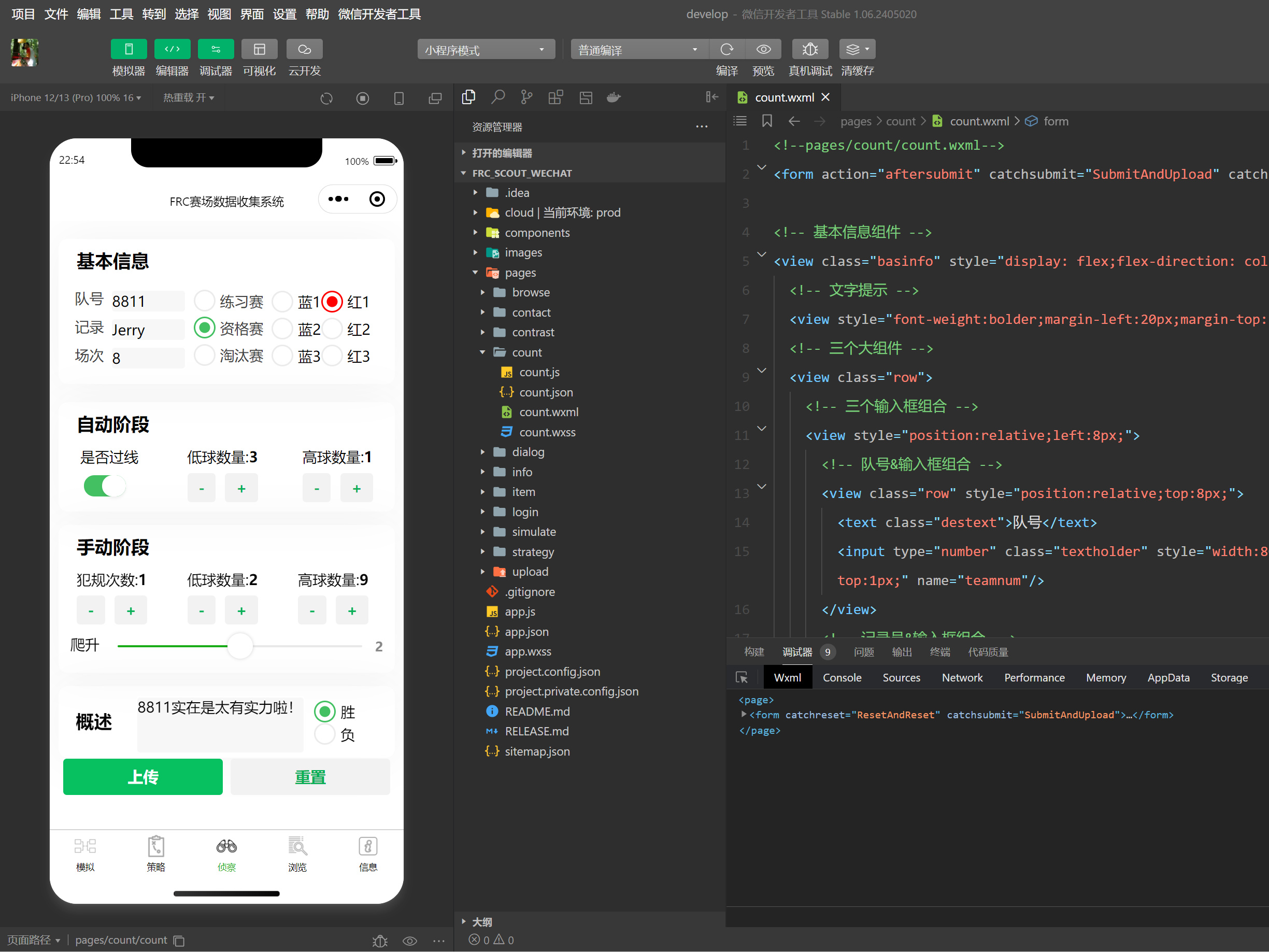
🎯 Custom Scouting App FRC Data Collection Software


Supervisor: Prof. Liang Chen, SCUT
The platform is equipped with an omni-directional wheel and a balancing mechanism.
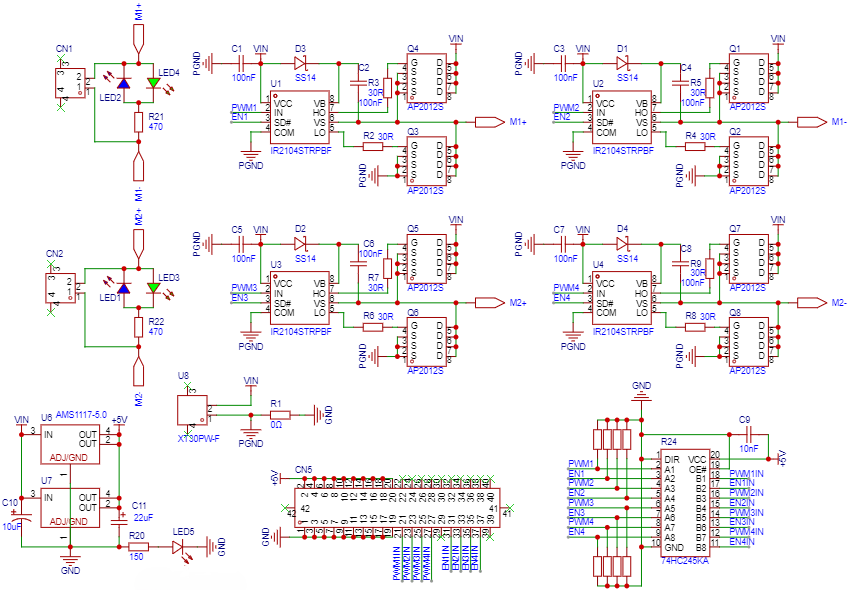
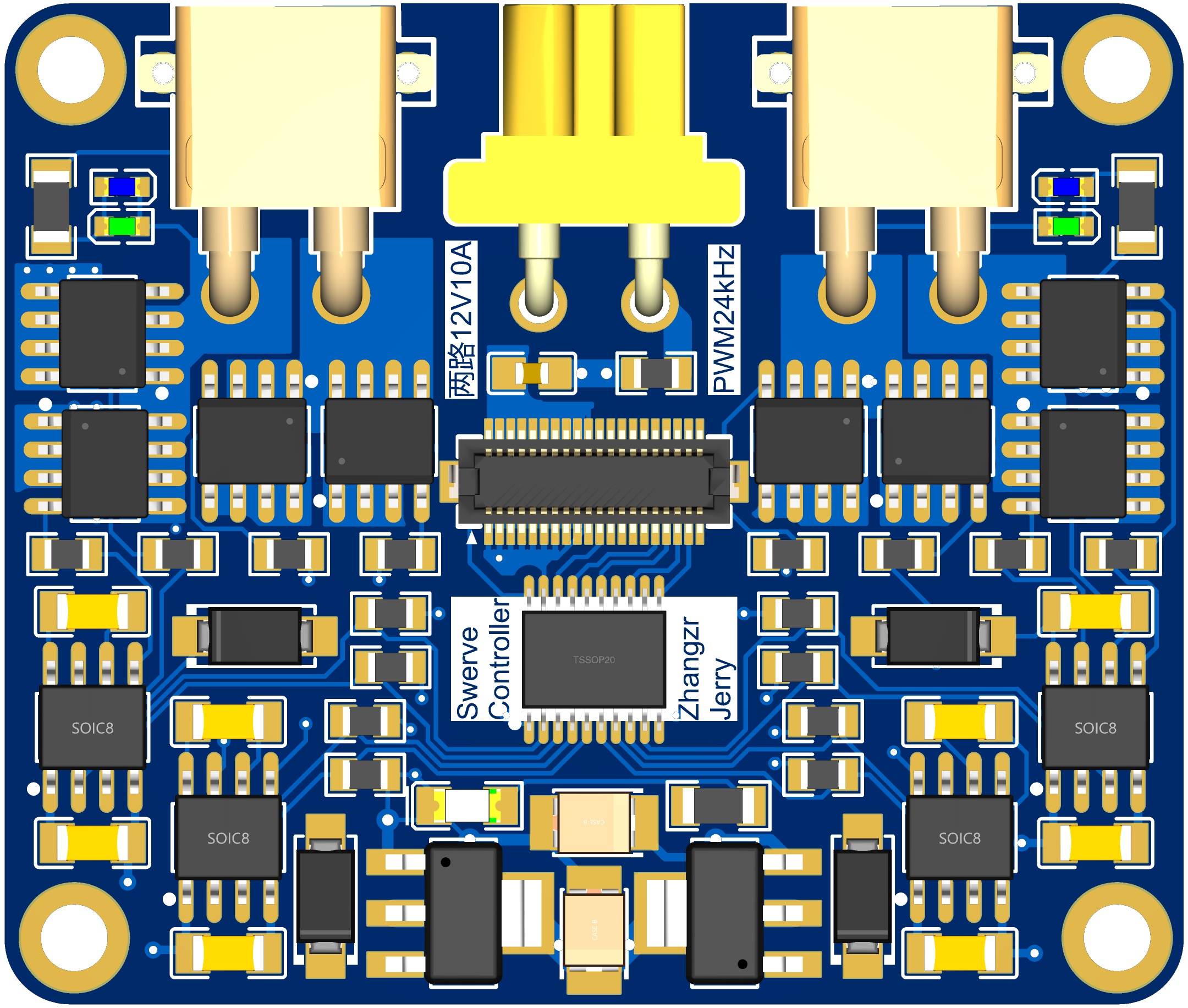
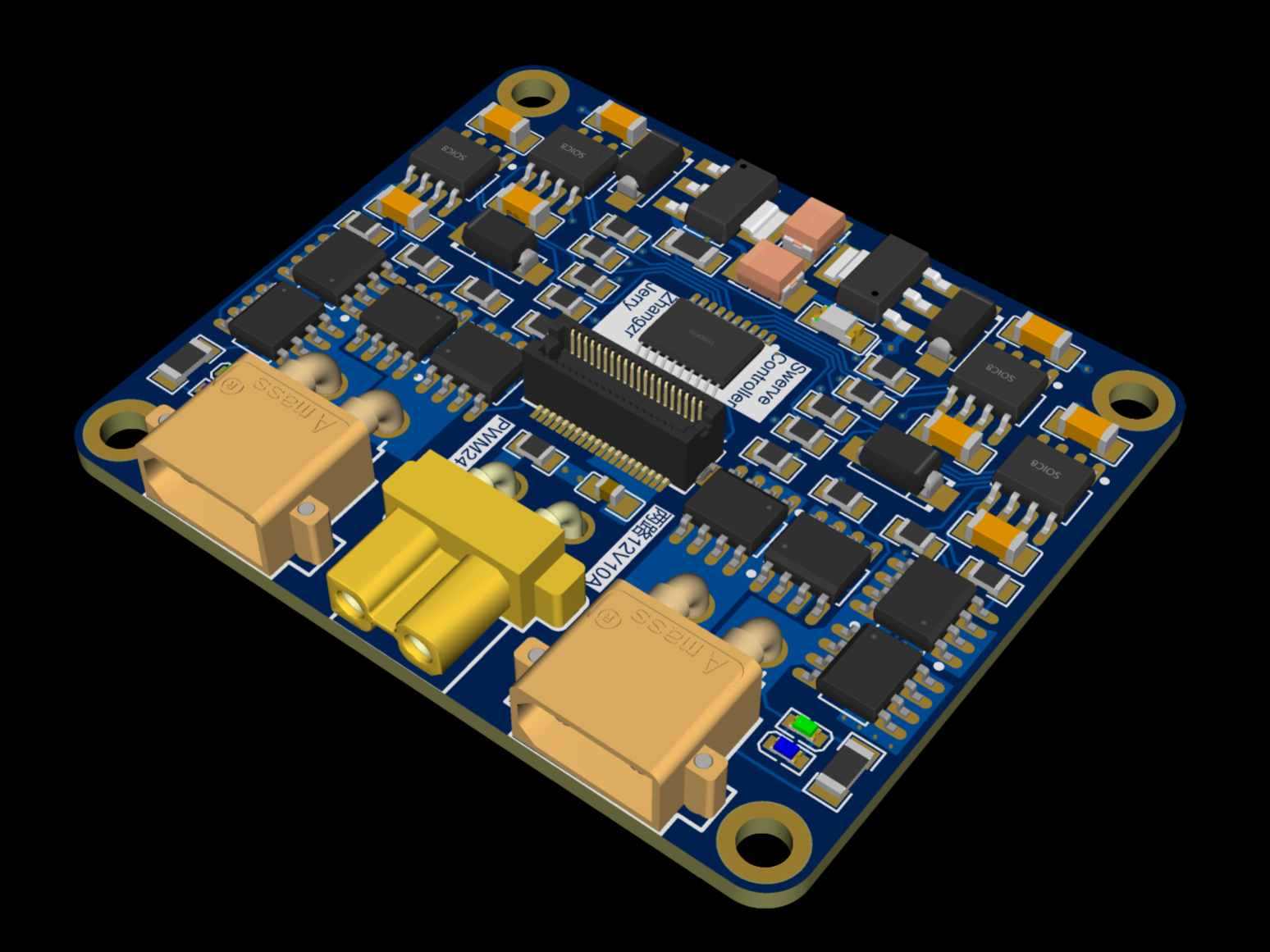
🚠 Custom Dual Motor Drive Board Swerve Controller




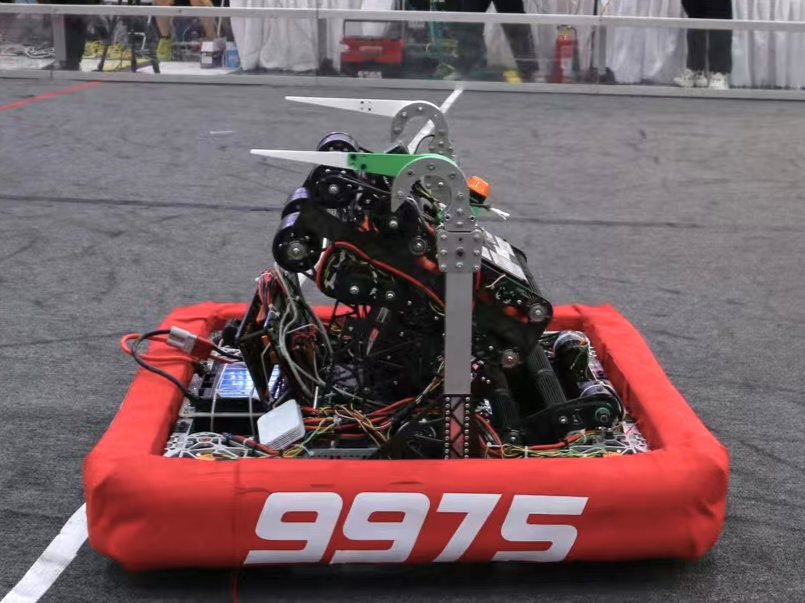
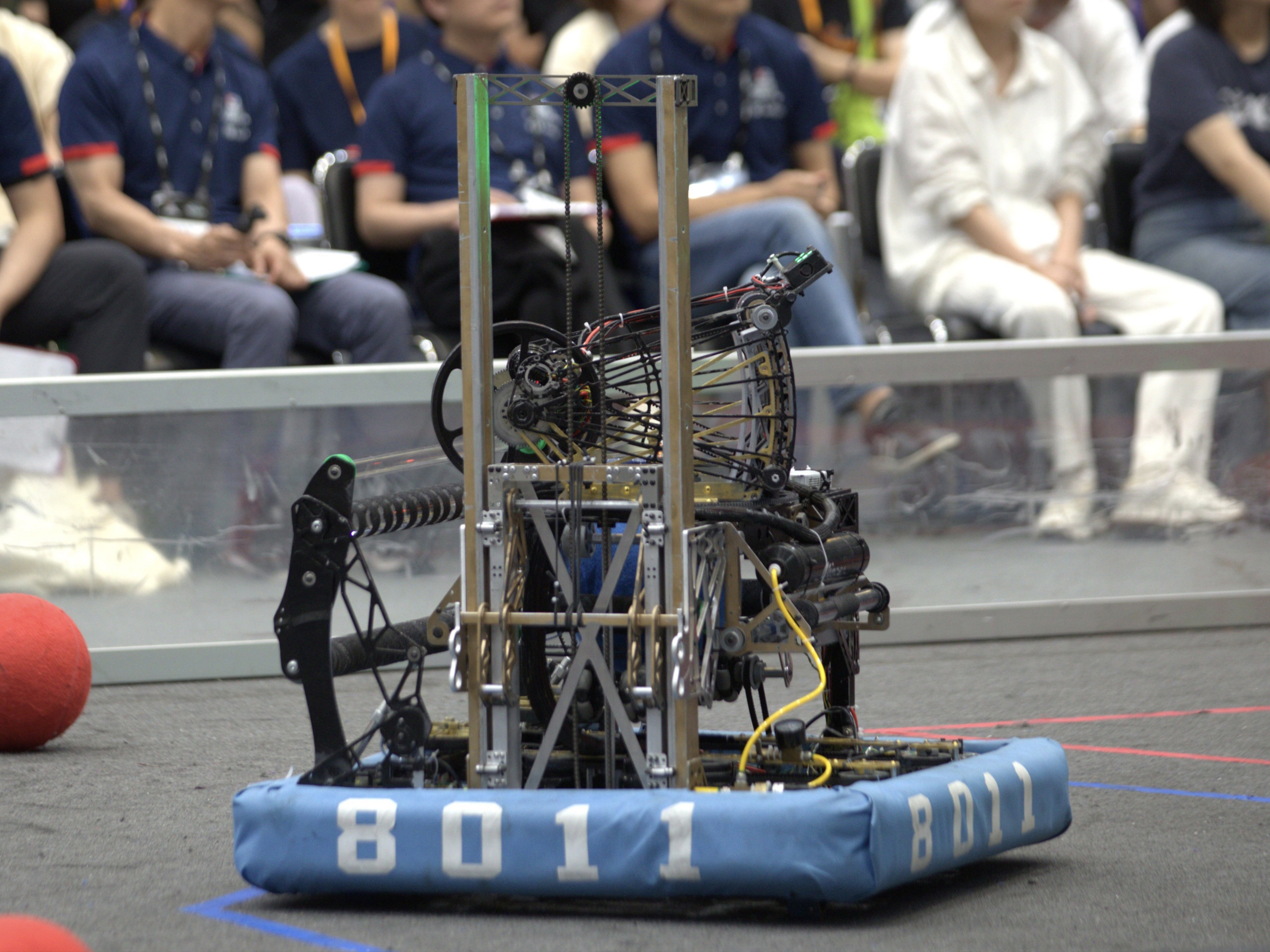
For FRC 2022 game rules, the mission of the robot is to collect and shoot the balls to the hub.
🏆 Excellence in Engineering Award in 2022 FRC Hangzhou Regional
For FRC 2021 game rules, the mission of the robot is to collect the power cell and shoot to the power port.
🏆 Rookie Game Changer Award in 2021 INFINITE RECHARGE At Home Challenge

For FRC 2020 game rules, the mission of the robot is to collect the power cell and shoot to the power port.
🏆 Champion in 2020 WE RoboStar Robotics League
Full List
{kind=link}
{kind=link}
{kind=link}





{kind=link}
{kind=link}
{kind=link}



{kind=link}



Supervisor: Prof. Yi Cai, SCUT