A Continuous-time Representation for VINS
S. Lovegrove, A. Patron-Perez, and G. Sibley, “Spline Fusion: A continuous-time representation for visual-inertial fusion with application to rolling shutter cameras,” in Procedings of the British Machine Vision Conference 2013, Bristol: British Machine Vision Association, 2013, p. 93.1-93.11. doi: 10.5244/C.27.93.
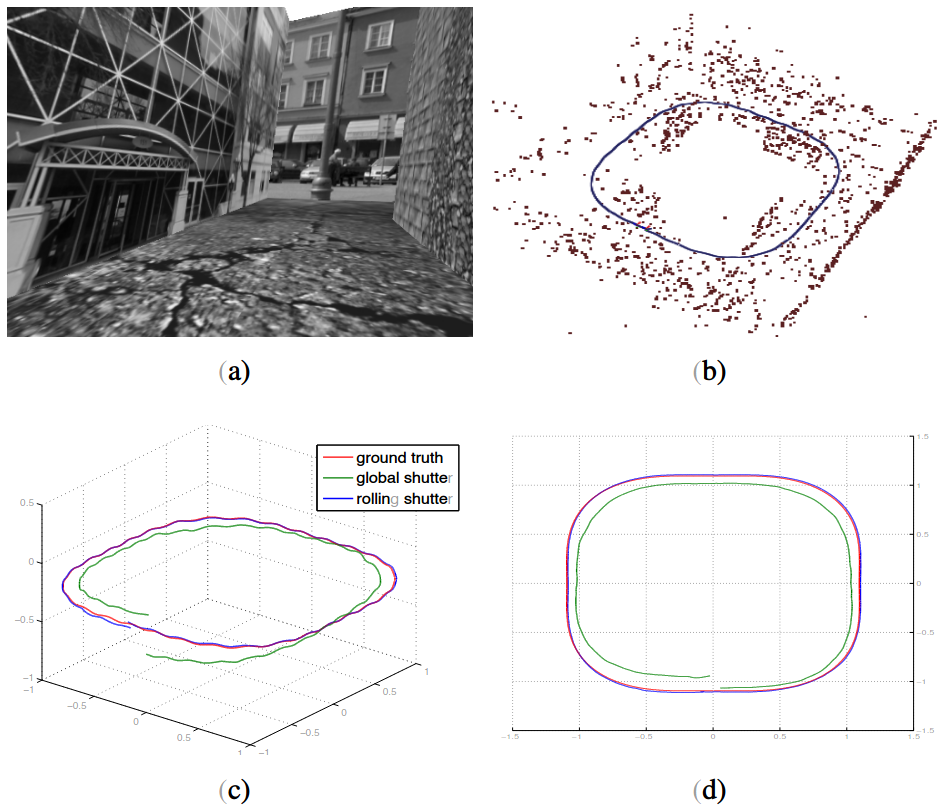
这篇论文主要工作是建立了卷帘相机的连续时域下的数学模型,初始化方法是利用 IMU 主动对齐视觉。

相比离散时域,在连续时域上表示有助于融合高帧率的传感器和异步时间戳的设备。对卷帘相机的研究尚未成熟,现有的工作主要集中在如何消除卷帘相机的畸变,而后复用标准全局快门相机的 SLAM 模型,这种解耦合的处理方式增加了无法修正的偏差。
单目视觉系统存在 7 自由度不可观:6 自由度姿态+尺度,一种方法通过回环检测和序列图松弛对尺度显式参数化,另一种方法是加入可以测量绝对尺度的设备。在本文中作者使用了惯性单元。相比过往建立在欧拉角上的数学表示,作者引入李群和李代数上的旋转表示避免了奇异点,同时能够更好地近似最小扭矩的轨迹。
作者希望轨迹的参数化方程是局部可控,二阶导连续,能近似最小力矩轨迹的。三次 B 样条曲线可以很好表示
自由度为
其中
作者进一步在假设控制点时间间隔不变的情况下(大多数单目系统应该都能满足),对时间做了归一化处理
并在参数
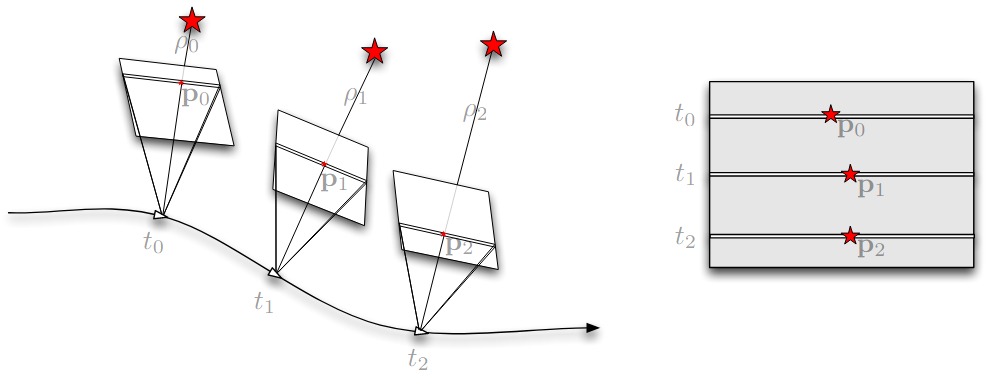
给定第一次观测的逆深度
对于一般的视觉惯性系统给出损失函数
而对卷帘相机则将
这一系统表现出了良好的自校准的能力