Detailed derivation of On-Manifold IMU Preintegration
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-Manifold Preintegration for Real-Time Visual--Inertial Odometry,” IEEE Trans. Robot., vol. 33, no. 1, pp. 1–21, Feb. 2017, doi: 10.1109/TRO.2016.2597321.
Z. Yang and S. Shen, “Monocular Visual–Inertial State Estimation With Online Initialization and Camera–IMU Extrinsic Calibration,” IEEE Trans. Automat. Sci. Eng., vol. 14, no. 1, pp. 39–51, Jan. 2017, doi: 10.1109/TASE.2016.2550621.
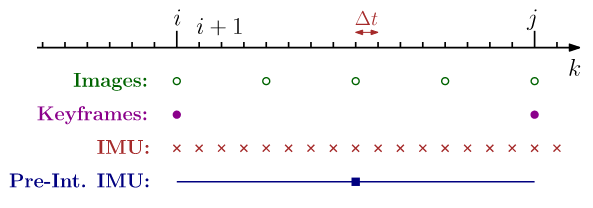
Inertial Measurement Unit (IMU) preintegration is a fundamental technique in visual-inertial odometry that efficiently combines high-frequency IMU measurements between keyframes. This approach, pioneered by Forster et al. and Yang et al., formulates the integration process on the manifold of rigid body motions
The key innovation lies in separating the integration of IMU measurements from the global state, enabling computationally efficient optimization by precomputing relative motion constraints. This derivation details the mathematical foundations, including the special orthogonal group


Special Orthology Group
The special orthology group
And its tagent space on the manifold
The hat operator
Rodrigues' Rotation Formula
Let
The whole vector
We get Rodrigues' Rotation Formula. Write it on the manifold, we then have:
The exponential map
For small angles, this simplifies to
Exponential Mapping
The logarithmic map $ \log : SO(3) \to \mathfrak{so}(3) $ extracts the axis-angle representation from a rotation matrix:
Logarithmic Mapping
So the trace of the rotation matrix satisfied:
The angle
When
So
For simplicity of notation,
Perturbation Models and Jacobians
For small perturbations
The right jacobian and its inverse are given by
Perturbation Jacobians
Since a general increment cannot be defined on the special orthogonal group
The Lie bracket (binary operator on Lie groups) is defined as:
Using the Baker-Campbell-Hausdorff (BCH) formula:
Additional Jacobians:
For any vector
Since
Equivalently:
Uncertainty Description in
An intuitive way to define uncertainty on rotation matrices is to right-multiply the matrix by a small perturbation that follows a normal distribution:
For Gaussian distributions, we have the normalization condition:
Substituting
The scaling factor, known as the Jacobian determinant, is given by the right-perturbation model:
Rewriting gives:
From this, the probability density function on
For small perturbations, the normalization term
Gauss-Newton Method on Manifolds
For standard Gauss-Newton optimization:
On manifolds, this becomes:
Where
In the case of the
For the
IMU Preintegration
The state of the system at time
Let
In this notation, the superscript
The time dirivatives of
Using these dynamics, we can express the system state at time
However, recomputing
This allows us to factor out
We define the following preintegrated terms:
Thus, the final update equations become:
Finally, since the gyroscope and accelerometer biases are modeled as Gaussian white noise processes with zero mean:
we assume that the bias remains approximately constant between two consecutive time steps: