PHR Conic Augmented Lagrangian Method
Slide: Starting from the penalty method, we extend to the augmented Lagrangian method for improved stability. By introducing
Introduction
Penalty Method
Consider the constrained optimization problem:
Penalty method solves a series of unconstrained problems:
Challenge:
- Requires
for exact solution, causing ill-conditioned Hessian. - Finite
leads to constraint violation .
Lagrangian Relaxation
The Lagrangian is defined as:
At the optimal solution
Uzawa's method iteratively updates
where
However, when
can be non-smooth even for smooth and . may be unbounded or have no finite solution.
Equality Constraint
PHR Augmented Lagrangian Method
Consider the optimization problem with a penalty on the deviation from a prior
The inner problem:
The outer problem:
PHR Augmented Lagrangian Method (cont.)
To increase precision:
- Reduce the penalty weight
- Update the prior multiplier
Uzawa's method for the augmented Lagrangian function is:
Penalty Method Perspective
The corresponding primal problem of the augumented Lagrangian Function is obviously:
Advantages:
- Even without
, the constraints can be exactly satisfied in the limit through multiplier updates. - For large
, the penalty term dominates, ensuring has a local solution. - The augmented dual function
is smooth in proper conditions, with .
Practical PHR-ALM
In practical, we use its equivalent form:
The KKT solution can be solved via:
where
Inequality Constraint
Slack Variables Relaxation
Consider the optimization problem with inequality constraints:
We use the equivalent formulation using slack variables:
where
We can directly form Lagrangian like equality-constrained case
Simplified Form
Summing over all components gives the final form:
For the dual update, from the optimality condition:
Summary
PHR Augmented Lagrangian Method for General Nonconvex cases:
Its PHR Augmented Lagrangian is defined as
The PHR-ALM is simply repeating the primal descent and dual ascent iterations:
Courtesy: Z. Wang
Symmetric Cone Constraint
Extension to Symmetric Cone Constraints
Consider the symmetric cone constrained optimization problem:
| Second Order Cone | Positive Definite Cone |
|---|---|
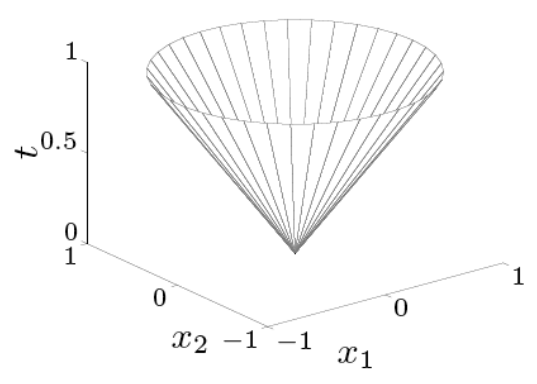 | 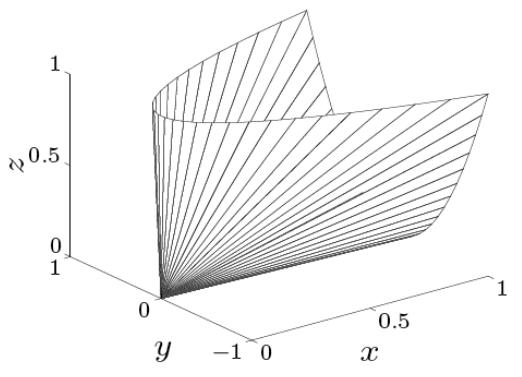 |
Generalized Inequality Constraint
For the symmetric cone constraint
The standard inequality constraint
t's projection operator is exactly element-wise max function:
Slack Variables Relaxation
Consider the optimization problem with inequality constraints:
By Euclidean Jordan algebra, the conit program is equivalent to
We can directly form Lagrangian like equality-constrained case
Simplified Form
Let
For the dual update, from the optimality condition:
where
Summary
PHR Augmented Lagrangian Method for General Nonconvex cases:
Its PHR Augmented Lagrangian is defined as
The PHR-ALM is simply repeating the primal descent and dual ascent iterations: