The Duality and the Failure of LQG Control
Slide: Explore the duality between state observers and feedback controllers, focusing on KF and LQR. Understand why combining the "optimal observer" with the "optimal controller" might fail. Inspired by Dominikus Noll's page "A generalization of the Linear Quadratic Gaussian Loop Transfer Recovery procedure (LQG/LTR)".
Introduction
System Model
Consider a
: state vector at time step : control input vector at time step : measurement vector at time step : state transition matrix : control input matrix : observation matrix
Controllability
A LTI system is said to be controllable if,
This is equivalent to
Observability
A LTI system is said to be observable if,
This is equivalent to
The Optimality
Optimal Estimator: Kalman Filter
Goal:
Solution:
Optimal Regulator: LQR
Goal:
Solution:
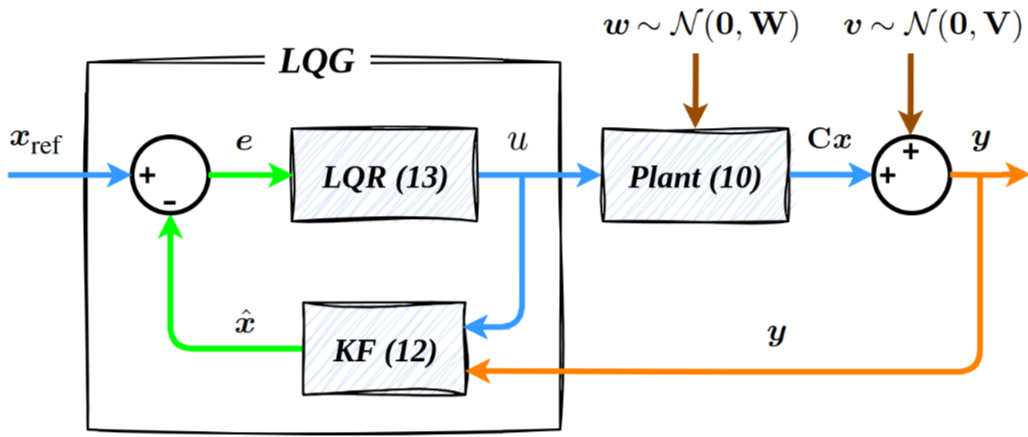
Linear Quadratic Gaussian (LQG)
The separation principle states that the design of the optimal controller and the optimal observer can be separated. The optimal control law is given by:
where
'Inertial-Based LQG Control' by Daniel Engelsman
The Duality
The Duality in Control Theory
Controllability vs Observability For the original system
is controllable is observable is observable is controllable
Controller vs Observer
- Feedback controller
"suppresses" the state deviation through inputs - State observer
"corrects" the state estimate through measurements - The design of
and are dual problems
The Duality in LQR and Kalman Filter (Optimization)
Optimization formulation of LQR:
Optimization formulation of Kalman Filter:
subject to
Duality:
The Duality in LQR and Kalman Filter (Riccati)
Riccati Equation in LQR:
Riccati Equation in Kalman Filter:
Duality:
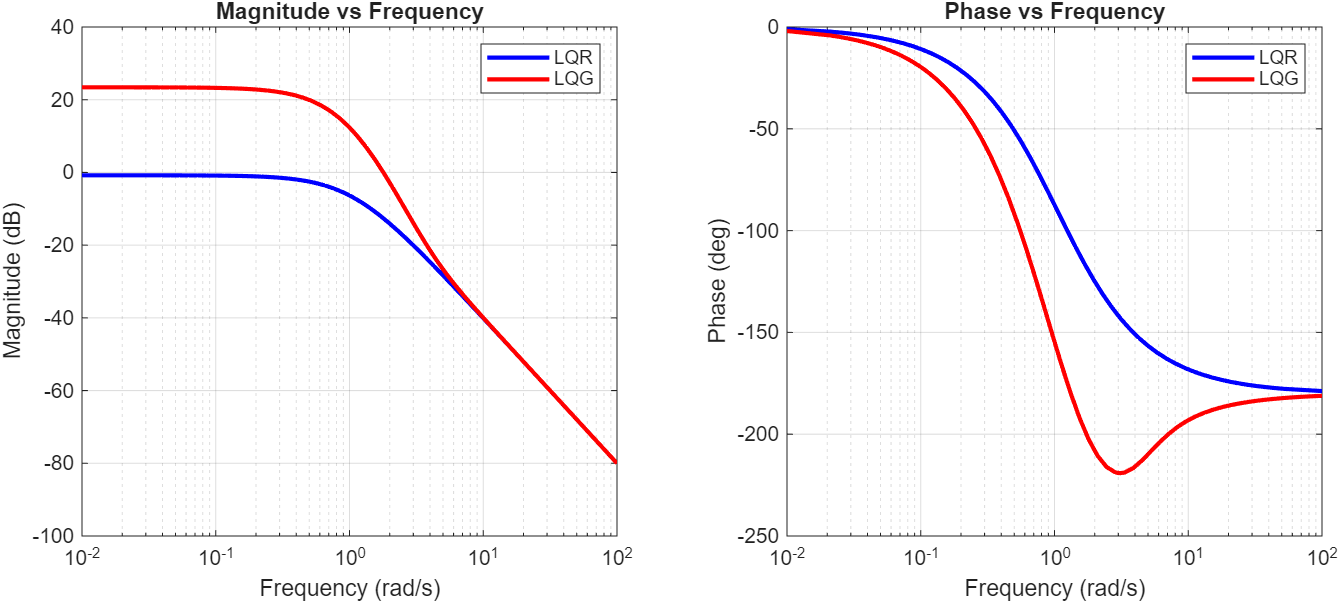
The Failure
The Paradox of Optimality
LQR Robustness (SISO systems):
Phase Margin Gain Margin - Infinite gain reduction margin
Kalman Filter Robustness:
- Dual robustness properties at sensor output
- Excellent margins against sensor errors
The Fundamental Trade-Off
LQR's Need for High-Gain Feedback:
- Large Q & Small R
- Excellent stability margins
KF's Need for High-Gain Feedback:
- Large W & Small V
- Prompt response to new measurements
Optimizing for individual robustness leads to a fragile combined LQG system.
The Destructive Feedback Loop:
- High-gain L reacts aggressively to state deviations
- High-gain K amplifies sensor noise
- This creates a positive feedback loop
- Resulting in potential instability of the system
No stability guarantee for imperfect models, leading to the development of