Robust Initialization of VINS
T. Qin and S. Shen, “Robust initialization of monocular visual-inertial estimation on aerial robots,” in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC: IEEE, Sep. 2017, pp. 4225–4232. doi: 10.1109/IROS.2017.8206284.
利用松耦合的方式对齐 IMU 与视觉
IMU 测量模型有
预积分
有一阶泰勒展开近似
SfM 给出视觉约束,
估计外参数
对于相邻时刻
将多个时刻的 IMU 预积分和视觉测量累计,即可得到关于
利用奇异值分解可解得
估计陀螺仪偏置
标定得到
又由旋转预积分一阶泰勒近似
联立得到
考虑虚部
进一步可以构建正定方程组,通过 Cholesky 分解求解
解得
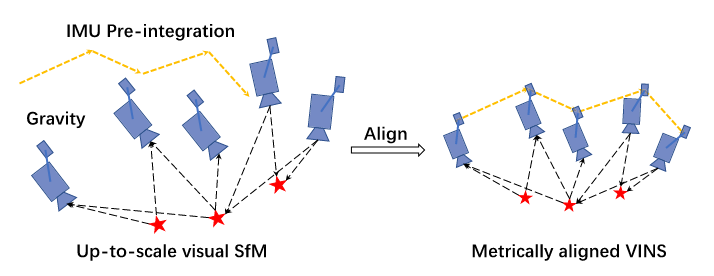
初始化速度、重力和尺度因子
所有我们希望估计的变量包括
由
整理方程得到
其中
进而可以转化为最小二乘问题求解
同样可以通过 Chologky 分解求得
重力向量优化
在重力模长已知的情况下,重力向量实际自由度为
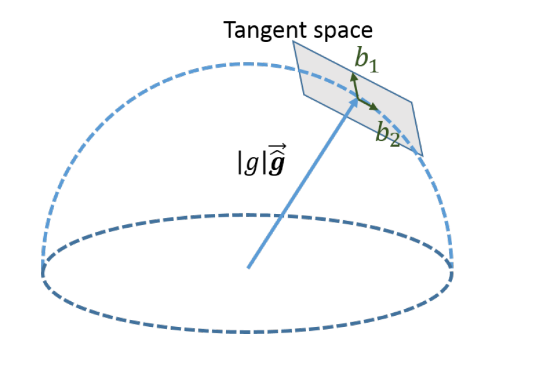
可以通过如下方式找到一组基底垂直于
将
观测方程变为
利用最小二乘对
视觉惯性对齐
根据旋转的性质和李代数的指数映射,我们可以构建从
接着为所有
未估计的参数
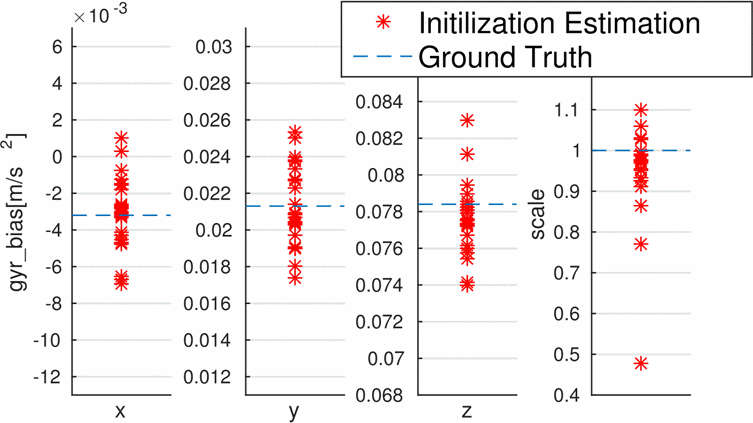
作者通过实验指出二者加速度计偏置